")







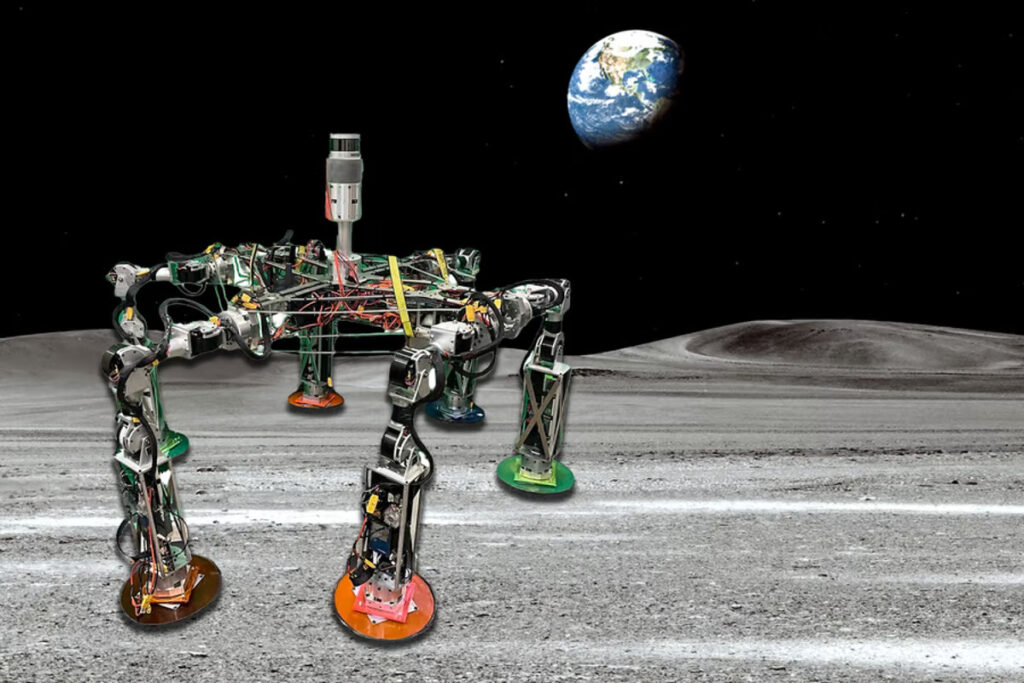 The spider-inspired WORMS-1 robot – other possible WORMS robots were inspired by animals such elephants, oxen and goats. George Lordos, et al; edited by MIT News
The spider-inspired WORMS-1 robot – other possible WORMS robots were inspired by animals such elephants, oxen and goats. George Lordos, et al; edited by MIT News
–
Its name an acronym for “Walking Oligomeric Robotic Mobility System,” WORMS was developed by a team of MIT engineers led by PhD candidate and graduate instructor George Lordos. He suggested the word “oligomeric,” which is a Greek term for “a few parts.”
The system was first conceived of last year in response to NASA’s Breakthrough, Innovative and Game-changing (BIG) Idea Challenge, in which university students were asked to develop robotic systems that could traverse extreme extraterrestrial terrain without using wheels.
Putting it simply, WORMS consists of worm-like articulated legs, different types of “shoes” that go on the bottoms of those legs, and different pallets which serve as the robots’ chassis. Twist-and-lock spring-loaded couplers known as Universal Interface Blocks (UCIs) are used to quickly and easily snap all of those bits together, in whatever combinations are desired.
In a demonstration of the technology, the team created a spider-inspired moon-mapping robot called WORMS-1. Its roughly diamond-shaped pallet is equipped with six legs – all of which share a single power source – along with a vertically protruding module in the middle that has a LiDAR sensor on top. The robot was presented by the engineers last week at the IEEE Aerospace Conference in Montana.
“You could imagine a shed on the moon with shelves of worms,” said Lordos. “Astronauts could go into the shed, pick the worms they need, along with the right shoes, body, sensors and tools, and they could snap everything together, then disassemble it to make a new one. The design is flexible, sustainable, and cost-effective.”
WORMS-1 can be seen in action, in the video below.
–
MIT WORMS Development Video Oct 2022
–
Source: MIT
–